
 Ασύρματος έλεγχος CNC τεσσάρων αξόνων για χρηση με Μικρόφωνο
Ασύρματος έλεγχος CNC τεσσάρων αξόνων για χρηση με Μικρόφωνο
 |
|  |
| 
Αυτή η κατασκευή φτιάχτηκε με σκοπό να χρησιμοποιηθεί σε ένα στούντιο ηχογράφησης.
Η κατασκευή έγινε στο σπίτι μου, άρα μην ψάχνεται για εξοπλισμούς κτλ, όσο ακόμα ήμουν φοιτητής, όπως καταλαβαίνετε το σπίτι είχε γίνει μη προσβάσιμο από ανθρώπους τον ένα μήνα περίπου που κράτησε η κατασκευή! :P
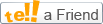
Ο χρήστης μπορεί από απόσταση να μεταβάλει τη θέση ενός μικροφώνου ώστε να επιτύχει τα επιθυμητά αποτελέσματα κατά την εγγραφή.
.
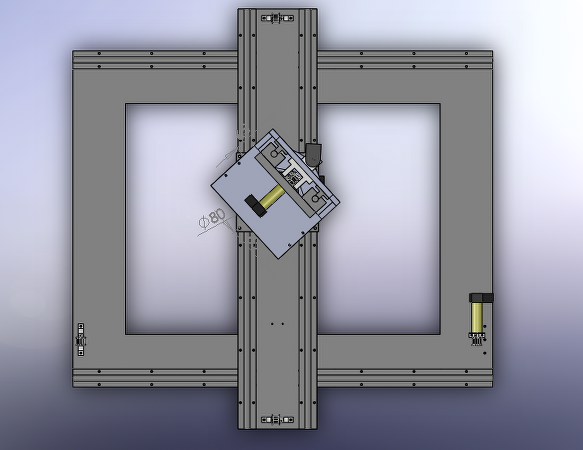
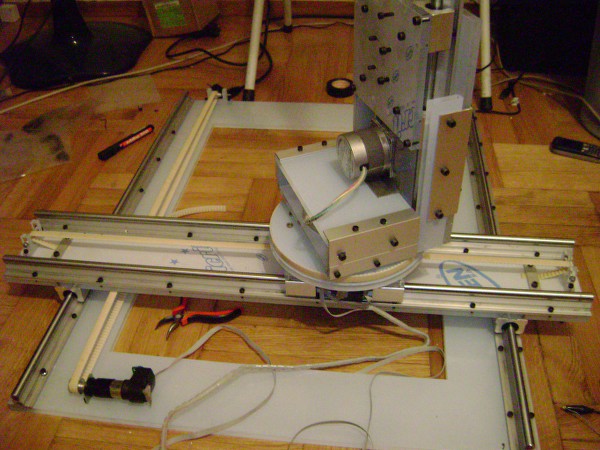
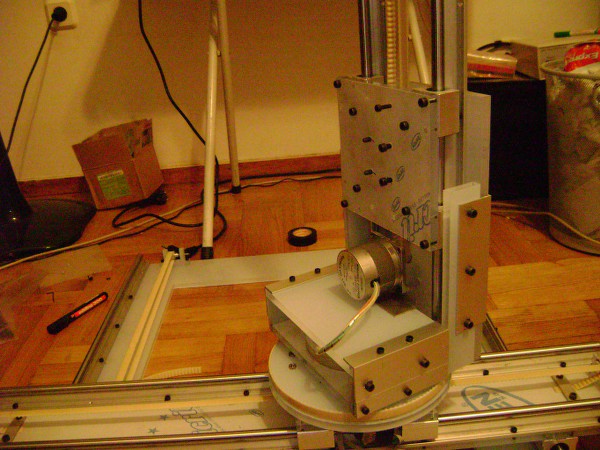
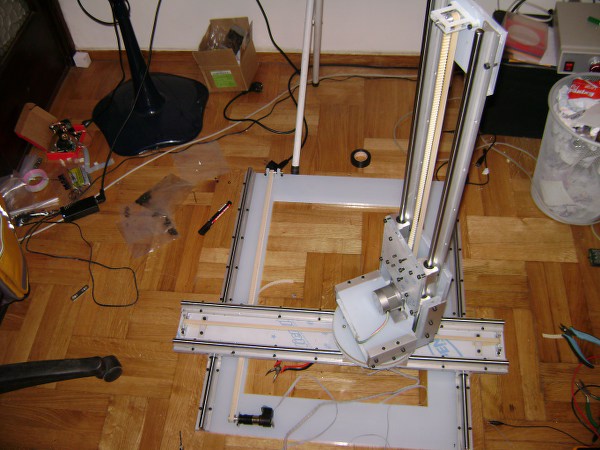
Οι πραγματικές διαστάσεις είναι 80χ80χ95 cm ενώ οι ωφέλιμες 60χ60χ60 και εκτελεί περιστροφή ±160ο
Η όλη κατασκευή φτιάχτηκε με το πρόγραμμα Solidworks 2008 το οποίο εκτός του ότι ήταν απαραίτητο για να βγάλουμε τα κομμάτια σε μορφή που μπορεί να διαβαστεί από το laser CNC, μας βοήθησε ιδιαίτερα στον εντοπισμό και διόρθωση κατασκευαστικών λαθών καθώς μέσω του simulation γλυτώνουμε πολύτιμο χρόνο και χρήμα από την προτυποποίηση της κατασκευής.
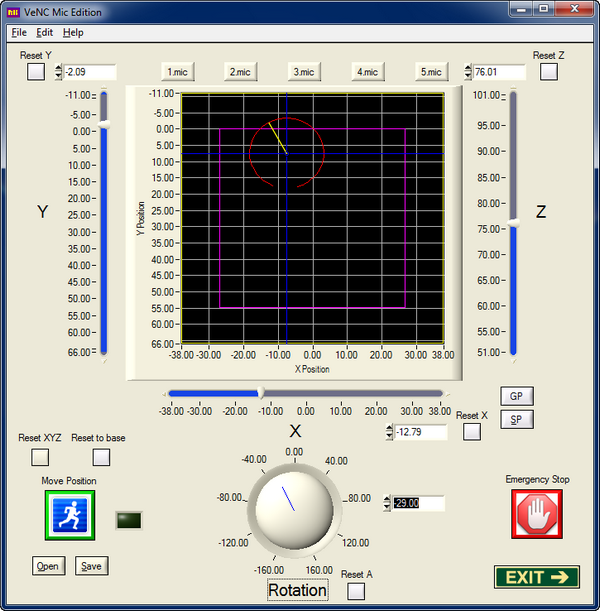
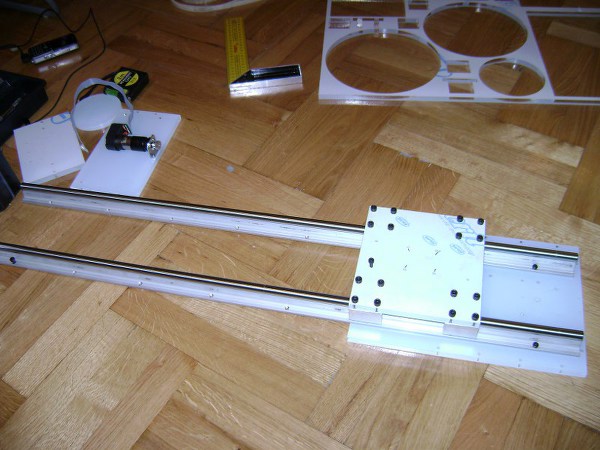
Είναι φτιαγμένο από ακρυλικό πλαστικό (πλεξιγκλάς) και κομμένο με laser CNC.

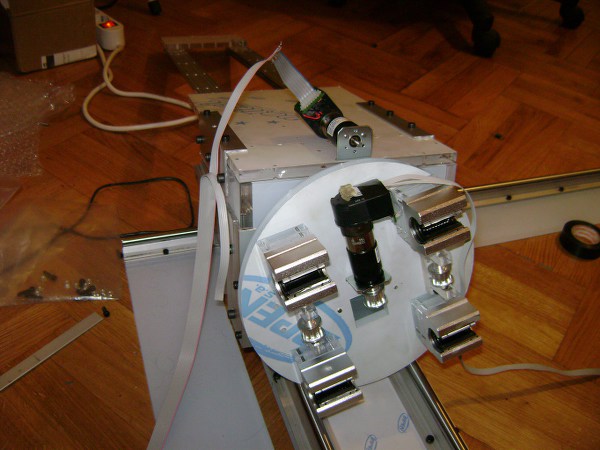
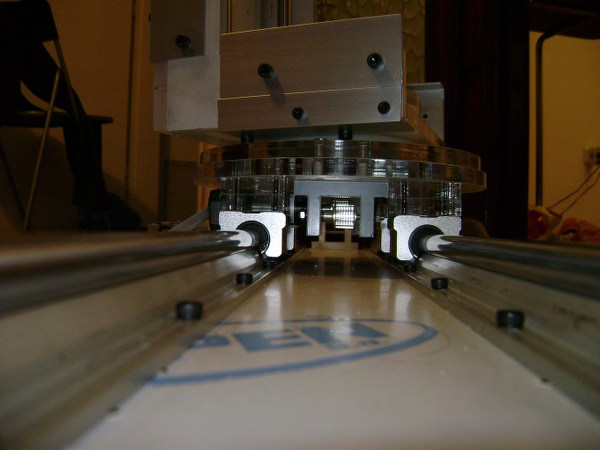
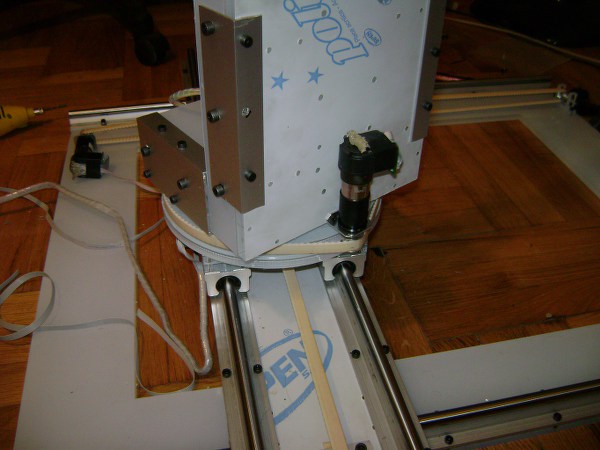
Η βάση της κατασκευής, αξονας Χ -Υ.
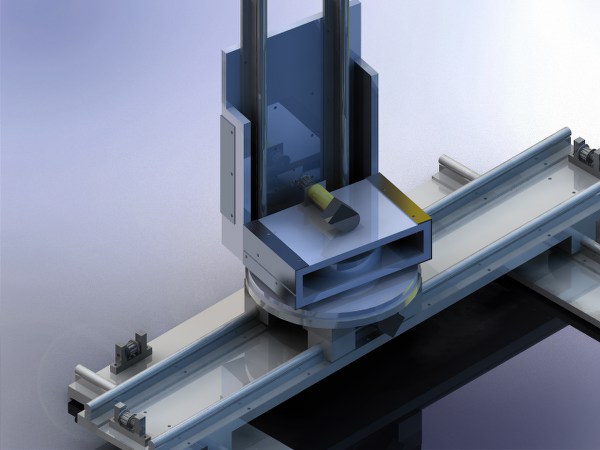
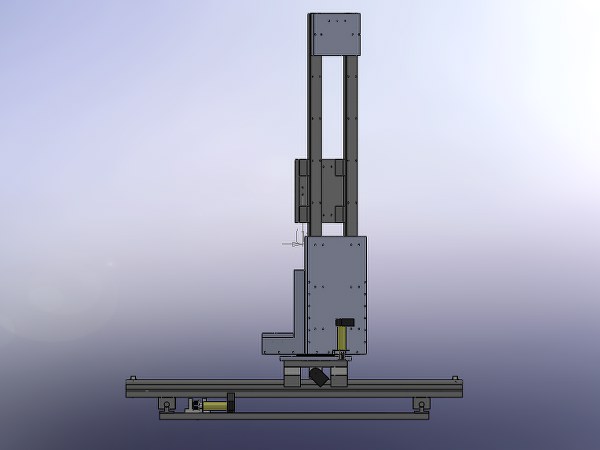
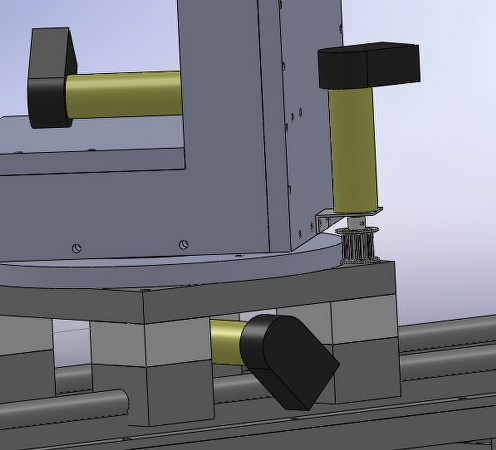
Ο κάθετος άξονας, Ζ.
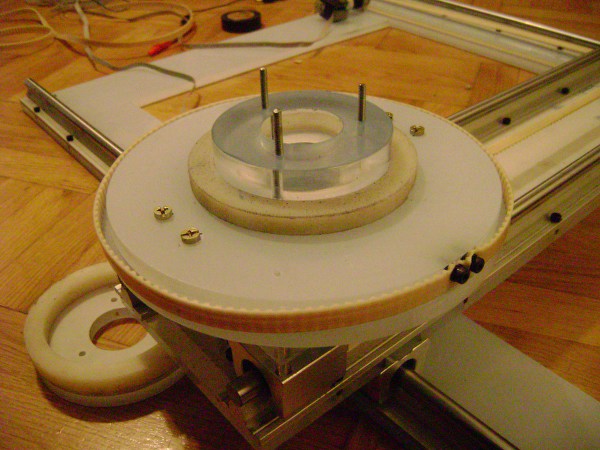
Για τη περιστροφή του κάθετου άξονα χρησιμοποιήθηκαν 2 χειροποίητες ροδέλες από τεφλόν, θα μπορούσαν να είναι ρουλεμάν αλλά οι διαστάσεις που χρειαζόμασταν δεν υπήρχαν στο εμπόριο και θα ήταν πανάκριβο να φτιάξουμε σε μηχανουργείο. Απ' την άλλη το τεφλόν είναι ένα πολύ σκληρό πλαστικό το οποίο έχει πολύ λείες επιφάνειες ικανές να χρησιμοποιηθούν σαν «ρουλεμάν».
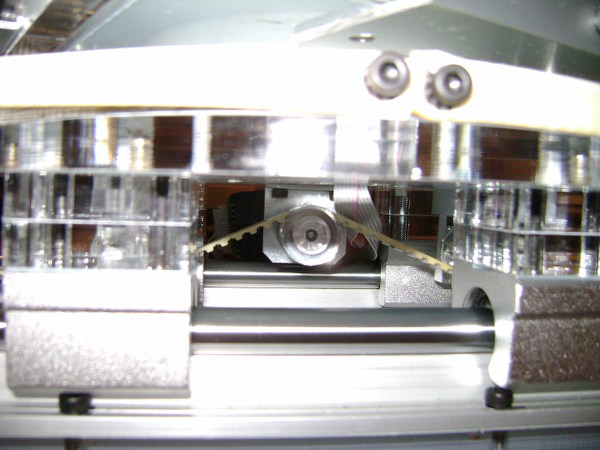
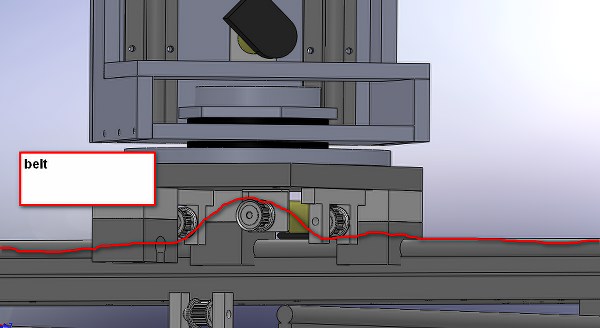
Ο ιμάντας του άξονα Υ είναι σταθερός και αντίθετα κινείται ο κινητήρας πάνω του. Αυτό έγινε διότι μόνο έτσι θα μπορούσε να χωρέσει ο κινητήρας στον τόσο μικρό χώρο που υπήρχε και χωρίς να χρησιμοποιηθεί κάποιο πιο πολύπλοκο σύστημα μετάδοσης κίνησης.

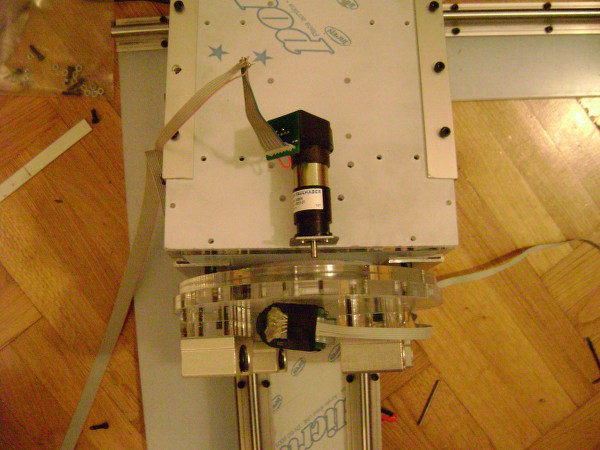
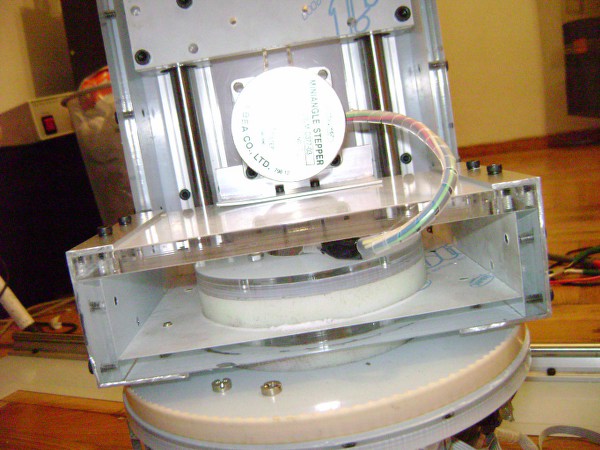
Χρησιμοποίει 3 DC brushless κινητήρες με ενσωματωμένο encoder για την κίνηση Χ-Υ-Α (περιστροφή) και έναν βηματικό κινητήρα για το Ζ (ύψος). Ο βηματικός κινητήρας στον άξονα Ζ επιλέχτηκε διότι οι DC κινητήρες δεν φρενάρουν όταν μένουν ακίνητοι, έτσι δε θα μπορούσαν να μείνουν σταματημένοι σε συγκεκριμένο ύψος (χωρίς τη χρήση εξελιγμένων αλγόριθμων). Τη λύση δίνει ένας βηματικός κινητήρας ο οποίος ακόμα και σταματημένος δέχεται σταθερή τάση στα πηνία του κάνοντας τον να «κλειδώνει» στο βήμα που σταμάτησε.
Περισσότερα για τους βηματικούς κινητήρες εδώ.
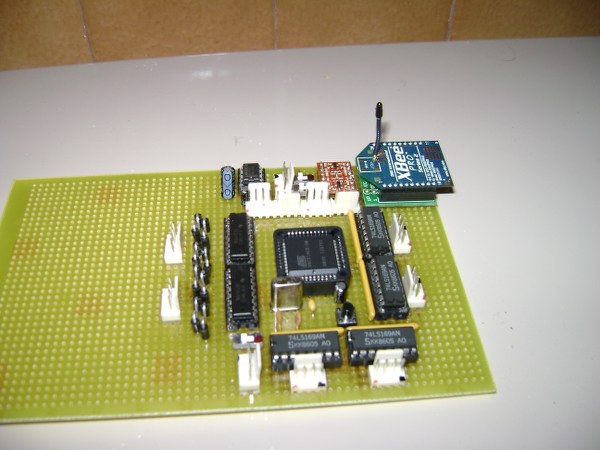
1) Πάνω δεξιά το ασύρματο module
2) Στη μέση ο μικροελεγκτής 8051
3) Τα δυο αριστερά ολοκληρωμένα είναι η H-bridge για τους DC κινητήρες
4) Τα δυο αριστερά και δυο κάτω ολοκληρωμένα χρησιμοποιούνται για τη μείωση των παλμών των encoder. Modulus16
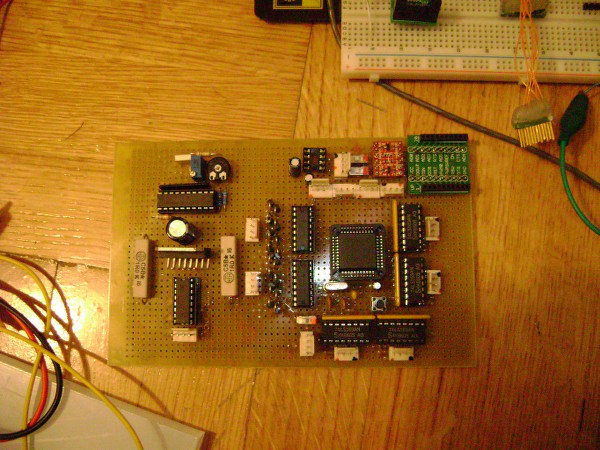
Όλο το αριστερό μέρος της πλακέτας είναι η γέφυρα μαζί με το λογικό μέρος του βηματικού κινητήρα. Πρόκειται για κλασικό κύκλωμα οδήγησης βηματικών που χρησιμοποιεί τα ολοκληρωμένα L297-L298.
Ο controller έχει φτιαχτεί με έναν μικροελεγκτή της οικογένειας 8051 σε γλώσσα assembly
Η ασύρματη λειτουργία γίνεται με το πρωτόκολλο ZigBee βασισμένο σε 802.15.4 σε συχνότητα 2.4GHz και απόσταση 1.5Km μέγιστο και 100m σε κλειστούς χώρους.
Δείτε το εν δράση στο βίντεο στην αρχή του άρθρου..
