Στην προσπάθεια να διαβάσω μετρήσεις από διάφορους αισθητήρες όπως επιταχυνσιόμετρα, μετρητές απόστασης και GPS βρέθηκα στη θέση όπου τα δεδομένα μου περιείχαν πολύ θόρυβο για να τα χρησιμοποιήσω όπως είναι.
Για παράδειγμα ένα gps έχει ακρίβεια 10m, άρα σε κάθε μέτρηση μπορεί να έχει πολύ μεγάλη απόκλιση από την πραγματική θέση Μπορεί δηλαδή να είμαστε εντελώς ακίνητοι αλλά λόγο της διαφορετικής μέτρησης να φαίνεται σα να κινούμαστε.
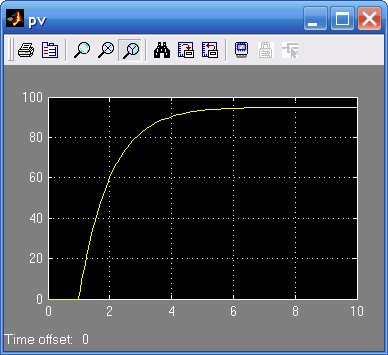
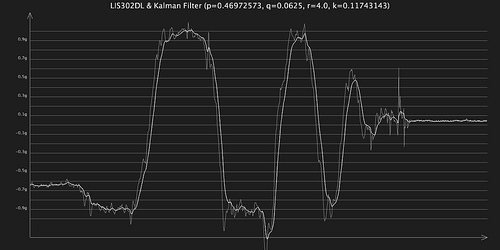
Πρέπει λοιπόν να βρούμε έναν τρόπο να απορρίπτουμε τις απότομες αλλαγές(θόρυβο) αλλά ταυτόχρονα να αντιλαμβανόμαστε έγκαιρα τις πραγματικές αλλαγές.
.

 Έρευνα και ανάπτυξη
Έρευνα και ανάπτυξη