
 Καλώς ήρθατε στο mechatronics.gr
Καλώς ήρθατε στο mechatronics.gr
Φιλτράρισμα Δεδομένων Αισθητήρων με ένα φίλτρο Kalman
 |
|  |
| 
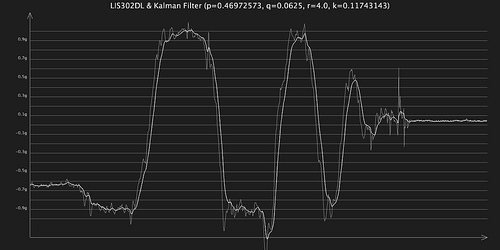
Στην προσπάθεια να διαβάσω μετρήσεις από διάφορους αισθητήρες όπως επιταχυνσιόμετρα, μετρητές απόστασης και GPS βρέθηκα στη θέση όπου τα δεδομένα μου περιείχαν πολύ θόρυβο για να τα χρησιμοποιήσω όπως είναι.
Για παράδειγμα ένα gps έχει ακρίβεια 10m, άρα σε κάθε μέτρηση μπορεί να έχει πολύ μεγάλη απόκλιση από την πραγματική θέση Μπορεί δηλαδή να είμαστε εντελώς ακίνητοι αλλά λόγο της διαφορετικής μέτρησης να φαίνεται σα να κινούμαστε.
Πρέπει λοιπόν να βρούμε έναν τρόπο να απορρίπτουμε τις απότομες αλλαγές(θόρυβο) αλλά ταυτόχρονα να αντιλαμβανόμαστε έγκαιρα τις πραγματικές αλλαγές.
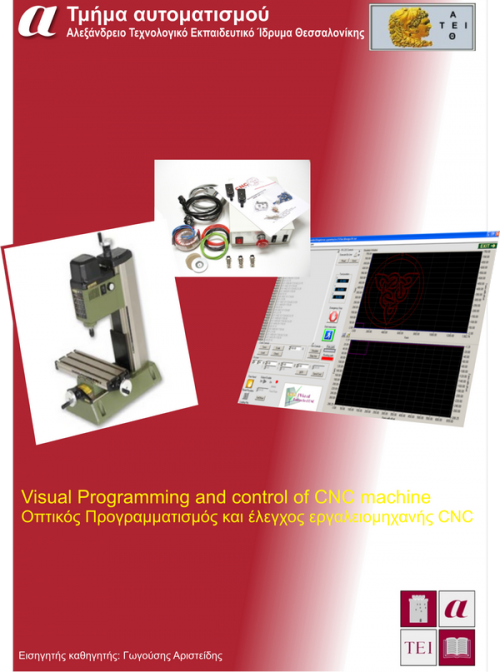
Οπτικός προγραμματισμός και έλεγχος εργαλειομηχανής CNC τριών αξόνων
| |
Εισαγωγή
Στην παρακάτω εργασία θα μιλήσουμε και θα αναδείξουμε τον τρόπο και τα βήματα που απαιτούνται για την κατασκευή ενός ελεγκτή αριθμητικού ελέγχου τριών αξόνων υποβοηθούμενου από υπολογιστή. Επίσης θα αναφερθούν πιθανά προβλήματα που δημιουργούνται καθώς και οι λύσεις που ο χρηστής μπορεί να χρησιμοποιήσει για να τα αντιμετωπίσει.
.
Βασικά χαρακτηριστικά των βηματικών κινητήρων
| |
Ηλεκτρικά χαρακτηριστικά των βηματικών κινητήρων
Ο βηματίκος κινητήρας είναι ένας σταθερός μετατροπέας παραγωγής δύναμης, όπου η δύναμη ορίζεται ως το γινόμενο της ροπής με την ταχύτητα. Αυτό σημαίνει ότι η ροπή των μηχανών είναι αντίστροφη της ταχύτητας. Για να βοηθήσουμε να καταλάβουμε γιατί η δύναμη ενός βηματίκου κινητήρα είναι ανεξάρτητη από την ταχύτητα, πρέπει να κατασκευάσουμε (μεταφορικά) έναν ιδανικό βηματικό κινητήρα.
Ένας ιδανικός βηματίκος κινητήρας θα είχε μη μηχανική τριβή, η ροπή του θα ήταν ανάλογη προς τις αμπέρ-στροφές και το μόνο ηλεκτρικό χαρακτηριστικό του θα ήταν η αυτεπαγωγή. Οι αμπέρ-στροφές απλά σημαίνουν ότι η ροπή είναι ανάλογη προς τον αριθμό στροφών του καλωδίου στο στάτη της μηχανής πολλαπλασιαζόμενο με το ρεύμα που περνά μέσω εκείνων των στροφών του καλωδίου.
.
Διασύνδεση της τυποποιημένης παράλληλης θύρας
| |
Εισαγωγή στις παράλληλες θύρες
Η παράλληλη θύρα είναι η συνηθέστερα χρησιμοποιημένη θύρα για τι διασύνδεση απλών εφαρμογών. Αυτή η θύρα θα επιτρέπει την εισαγωγή μέχρι 9 μπιτ ή την εξαγωγή 12 μπιτ σε οποιοδήποτε δεδομένο χρόνο, απαιτώντας κατά συνέπεια ελάχιστα εξωτερικά στοιχεία κυκλώματος για να εφαρμοστεί σε πολλές απλές εφαρμογές. Η θύρα αποτελείται από 4 γραμμές ελέγχου, 5 γραμμές κατάστασης και 8 γραμμές δεδομένων. Βρίσκεται συνήθως στο πίσω μέρος του PC ως D-type 25 θηλυκός σύνδεσμος. Μπορεί επίσης να υπάρξει ένας D-type 25 αρσενικός σύνδεσμος. Αυτή θα είναι όμως μια σειριακή θύρα RS-232 και έτσι, είναι ένας τελείως διαφορετικός τύπος θύρας.
Οι νεώτερες παράλληλες θύρες είναι τυποποιημένες κάτω από το ieee 1284 πρότυπο που παρουσιάστηκε το 1994, Αυτό το πρότυπο καθορίζει 5 τρόπους λειτουργίας που είναι οι ακόλουθοι:
