
 Computer Vision truck robot
Computer Vision truck robot
 |
|  |
| 
| Article Index |
|---|
| Computer Vision truck robot |
| EZtruck constraction |
| Power supply |
| programming |
| conclusion |
| All Pages |
Εισαγωγή
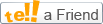
Πρόκειται για μια ρομποτική κατασκευή η οποία χρησιμοποιεί τεχνικές οπτικής αναγνώρισης για να “καταλαβαίνει” χρώματα ή αντικείμενα και να αλληλεπιδρά μαζί τους. Μπορεί δηλαδή να αναγνωρίσει κάποιο συγκεκριμένο σχήμα-χρώμα, ακόμα και πρόσωπο, και να κινηθεί προς το μέρος του ή να κάνει κάποια συγκεκριμένη ενέργεια. Διαθέτει περιμετρικά αισθητήρες μέτρησης αποστάσεων για την αποφυγή εμποδίων καθώς και για την μέτρηση της απόστασης από τον στόχο.
.Ο “εγκέφαλος” του οχήματος δεν βρίσκεται πάνω στο όχημα, αλλά όλα τα δεδομένα που λαμβάνει από τους αισθητήρες καθώς και από την κάμερα στέλνονται με streaming μέσω ασυρμάτου δικτύου wi-fi στον κεντρικό υπολογιστή ο οποίος αναλαμβάνει να αξιολογήσει τα δεδομένα και να ενεργήσει ανάλογα
Ο χειρισμός γίνεται χρησιμοποιώντας ένα χειριστήριο παιχνιδομηχανής (τύπου PS2) συνδεδεμένο στη USB θύρα του υπολογιστή μας. Με το χειριστήριο έχουμε τη δυνατότητα να κινήσουμε χειροκίνητα το όχημα και βλέποντας ότι βλέπει μέσω της κάμερας και των αισθητήρων να περιηγηθούμε ελευθέρα στο χώρο. Φυσικά με το πάτημα ενός κουμπιού περνάμε στην αυτόματη λειτουργία όπου το όχημα αναλαμβάνει χωρίς ανθρώπινη καθοδήγηση (αυτόνομα) να φτάσει στον προορισμό-στόχο του.
Για τον οπτικό εντοπισμό των αντικειμένων χρησιμοποίει τον μηχανισμό που περιγράφεται πιο αναλυτικά στο άρθρο «Οπτική αναγνώριση και παρακολούθηση αντικείμενων σε πραγματικό χρόνο». (link)
Ας δούμε όμως πιο αναλυτικά τη χρειάζεται μια τέτοια κατασκευή.
Υλικά
Η κατασκευή απαιτεί τα εξής υλικά:
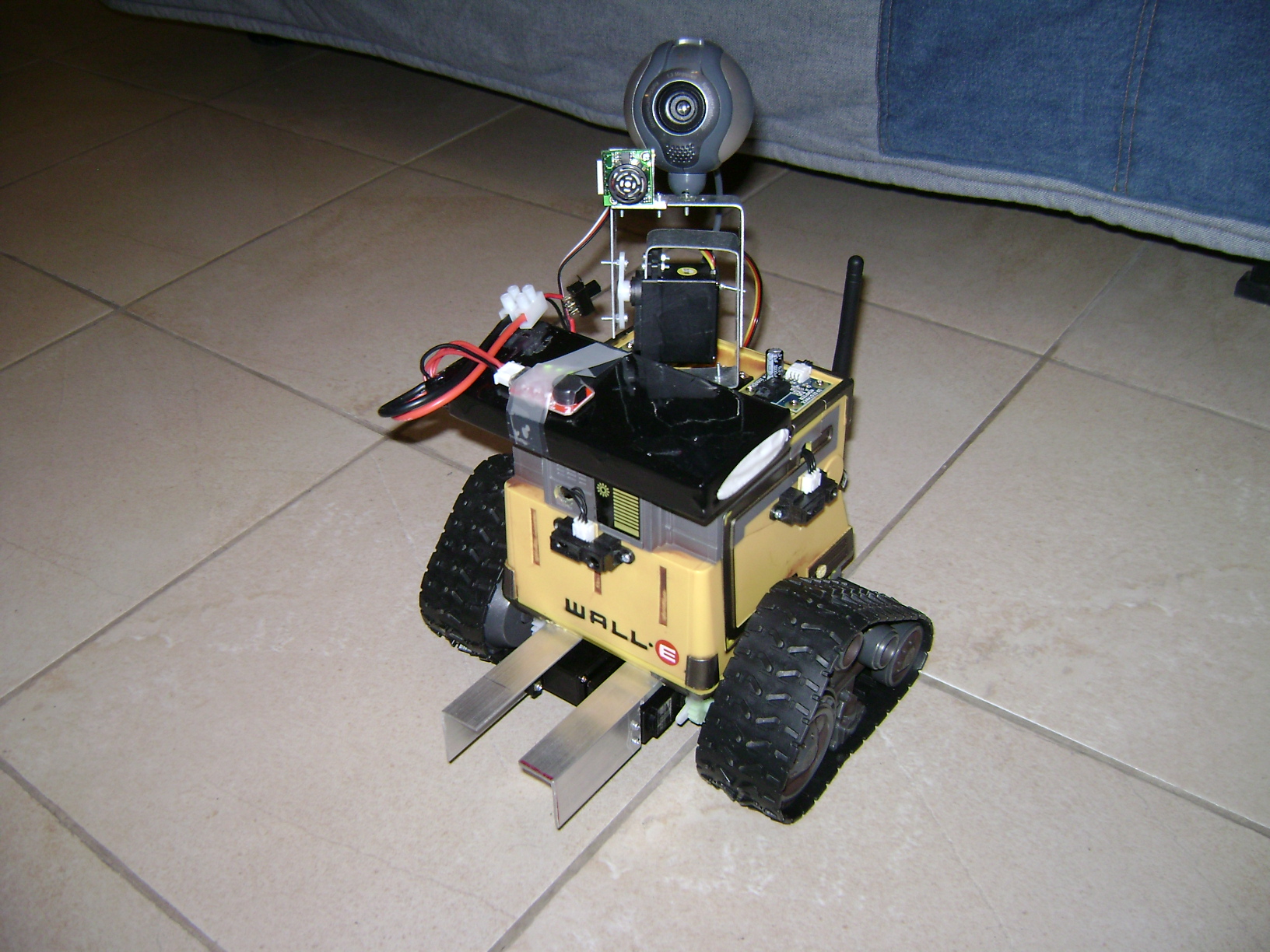
- 1χ PhidgetSBC
http://www.futurehouse.gr/index.php?main_page=product_info&cPath=47&products_id=266
Το PhidgetSBC είναι πλήρως λειτουργική ενιαία μονάδα με ενσωματωμένο υπολογιστή που τρέχει Linux με Java και C libraries. Μπορείτε να συνθέσετε τα δικά σας προγράμματα ή να προσαρμόσετε το OS, και να τα τρέξετε στην ενσωματωμένη μνήμη του ή απομακρυσμένα μέσω.
- Διαθέτει εύκολο περιβάλλον διαμόρφωσης.
- 4 USB θύρες μέγιστης ταχύτητας συμβατές με δικτυακές κάμερες και Phidget USB συσκευές.
- Ενσωματωμένο το PhidgetInterfaceKit 8/8/8.
- Θύρα Ethernet και ενσωματωμένος USB αντάπτορας ασύρματου δικτύου.
- Χρήση απομακρυσμένη με Phidgets από έναν άλλο υπολογιστή οπουδήποτε στο δίκτυο.
Το SBC αναλαμβάνει να πάρει όλες τις μετρήσεις των αισθητήρων και την εικόνα της usb κάμερας και να τα στείλει μέσω του usb WI-FI dongle που χρησιμοποιεί στον κεντρικό υπολογιστή. Επίσης επάνω του είναι συνδεδεμένο, μέσω usb, και το PhidgetAdvancedServo 8-Motor.
- 1χ Sonar Sensor
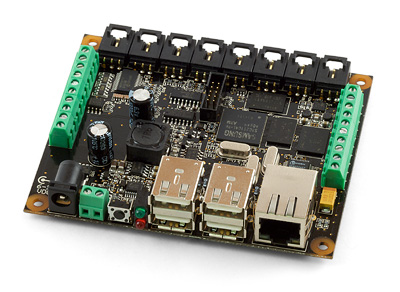
- 3χ IR Distance Sensor
- 2χ Hitec HS-1425CR Continuous Rotation Servo
- 1χ Παιχνίδι Wall-e (από κατάστημα παιχνιδιών)
- Μπαταρία 11,1V LiPo 3S 5200mAh (από ebay)

http://www.futurehouse.gr/index.php?main_page=product_info&cPath=49_27&products_id=271
Αισθητήρας μέτρησης αποστάσεων με υπέρηχους. Η ικανότητα μέτρησης είναι από 0 έως 6,45 μέτρα με ακρίβεια 2,5cm.
Η βασική διαφορά του ultrasonic από τον αισθητήρα υπερύθρων (IR) είναι ότι ο ultra sonic μπορεί να «βλέπει» αντικείμενα με μικρή επιφάνεια (όπως τα πόδια μιας καρέκλας) αλλά είναι ποιο ευπαθής στις λάθος μετρήσεις καθώς επηρεάζεται έντονα από φαινόμενα ανάκλασης (όπως του πατώματος) και ηχούς.
http://www.futurehouse.gr/index.php?main_page=product_info&cPath=49_27&products_id=226
Αισθητήρας μέτρησης αποστάσεων με υπέρυθρες. Ικανότητα μέτρησης από 10cm έως 80cm. H ακρίβεια του είναι μεγαλύτερη από αυτήν των ultrasonic αλλά δεν εντοπίζει μικρές επιφάνειες. Επίσης η απόσταση που μπορεί να μετρήσει είναι σημαντικά περιορισμένη.
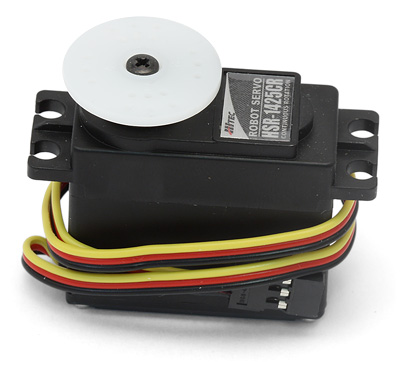
http://www.futurehouse.gr/index.php?main_page=product_info&cPath=50_66&products_id=330
Δυο servo συνεχούς περιστροφής χρησιμοποιήθηκαν για την κίνηση του robot.
Η δυνατότητα ελέγχου της κατεύθυνσης και ταχύτητας του κάθε servo ξεχωριστά μας επιτρέπει να κινηθούμε όπου και με όποιο τρόπο θέλουμε.

Από το συγκεκριμένο παιχνίδι κρατήθηκαν μόνο οι ερπύστριες και το σασί (πλαστικό περίβλημα). Όλα τα ηλεκτρονικά καθώς και το σύστημα κίνησης που είχε αλλάχτηκαν ώστε να είναι δυνατή η πλήρης παραμετροποίηση του. (+ ότι ο χώρος ήταν τόσο περιορισμένος που ακόμα και αν ήθελα να κρατήσω κάτι, όπως τα χέρια, απλά δεν χωρούσε.)
Οι αλλαγές πάνω του ήταν τόσες που ίσως να ήταν προτιμότερη η κατασκευή ενός πλαισίου ξεκινώντας από το μηδέν. ;)

Ανάλυση για την τροφοδοσία θα βρείτε παρακάτω.
