
 Καλώς ήρθατε στο mechatronics.gr
Καλώς ήρθατε στο mechatronics.gr
Οπτική αναγνώριση και παρακολούθηση αντικείμενων σε πραγματικό χρόνο
 |
|  |
| 
Οι τεχνολογίες οπτικής αναγνώρισης και παρακολούθησης αντικειμένων σε πραγματικό χρόνο μπαίνουν όλο και πιο έντονα στην καθημερινότητα μας. To βλέπουμε στα πάρκινγκ σούπερ μάρκετ και εμπορικών, στα διόδια σε εφαρμογές ακόμη και παιχνίδια. Στη ρομποτική μάλιστα η “όραση” είναι από τα πρώτα πράγματα που σκέφτεται κάποιος να ενσωματώσει ή που θα ήθελε να ενσωματώσει στο δημιούργημα του.
.
Ασύρματος έλεγχος CNC τεσσάρων αξόνων για χρηση με Μικρόφωνο
| |
Αυτή η κατασκευή φτιάχτηκε με σκοπό να χρησιμοποιηθεί σε ένα στούντιο ηχογράφησης.
Η κατασκευή έγινε στο σπίτι μου, άρα μην ψάχνεται για εξοπλισμούς κτλ, όσο ακόμα ήμουν φοιτητής, όπως καταλαβαίνετε το σπίτι είχε γίνει μη προσβάσιμο από ανθρώπους τον ένα μήνα περίπου που κράτησε η κατασκευή! :P
Ο χρήστης μπορεί από απόσταση να μεταβάλει τη θέση ενός μικροφώνου ώστε να επιτύχει τα επιθυμητά αποτελέσματα κατά την εγγραφή.
.
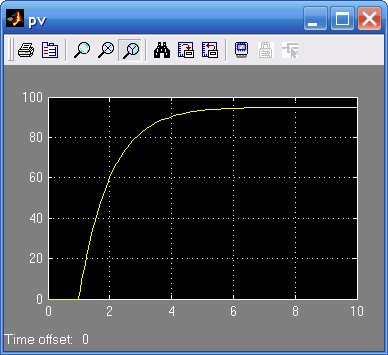
PID CONTROLER (έλεγχος ταχύτητας σε DC κινητήρα)
| |
Ο ελεγκτής PID χοντρικά...
Έχετε ένα αμάξι που με τέρμα γκάζι πηγαίνει 200χλμ..
Σας λέει κάποιος λοιπόν ότι θέλει να πάτε με 100 ακριβώς. Λέει κάποιος άλλος ..θα πατήσω το γκάζι μέχρι την μέση και άρα θα πάει ακριβώς 100!! Σωστό.. αλλά!! Λόγω αντίστασης κτλ. θα πάτε 95. Επίσης η ταχύτητα σας θα είναι κάπως έτσι:
.
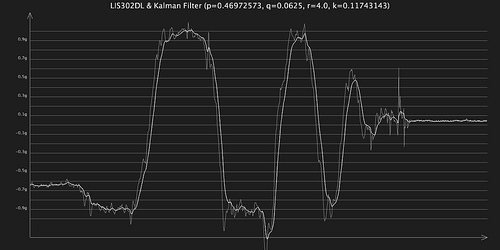
Φιλτράρισμα Δεδομένων Αισθητήρων με ένα φίλτρο Kalman
| |
Στην προσπάθεια να διαβάσω μετρήσεις από διάφορους αισθητήρες όπως επιταχυνσιόμετρα, μετρητές απόστασης και GPS βρέθηκα στη θέση όπου τα δεδομένα μου περιείχαν πολύ θόρυβο για να τα χρησιμοποιήσω όπως είναι.
Για παράδειγμα ένα gps έχει ακρίβεια 10m, άρα σε κάθε μέτρηση μπορεί να έχει πολύ μεγάλη απόκλιση από την πραγματική θέση Μπορεί δηλαδή να είμαστε εντελώς ακίνητοι αλλά λόγο της διαφορετικής μέτρησης να φαίνεται σα να κινούμαστε.
Πρέπει λοιπόν να βρούμε έναν τρόπο να απορρίπτουμε τις απότομες αλλαγές(θόρυβο) αλλά ταυτόχρονα να αντιλαμβανόμαστε έγκαιρα τις πραγματικές αλλαγές.